D3PMZ-1100-P3 Delta Robot
Ապրանքի բնութագիրը
Բնութագրական
1, Ստանդարտ ցիկլի ժամանակը 0,5 վրկ-ից պակաս է, որը համապատասխանում է ձեր ձգտմանը բարձր արագության և նվազագույն ծավալի համար:
2, Շարժվող հարթակի վրա պտտվող շարժիչի առաջադեմ դիզայնը, որը ռոբոտին հնարավորություն է տալիս հեշտությամբ հասնել պտտման բարձր ճշգրտության:
3, Ռոբոտը իդեալական է նեղ տիեզերական գործողությունների համար, ինչպես նաև բարձր արագությամբ և բարձր ճշգրտությամբ 3C դաշտում:Լայնորեն օգտագործվում է փոքր աշխատանքային մասերի հավաքման, մշակման և փորձարկման մեջ:
Ապրանքի պարամետրեր
| Տիպ | D3PMZ-1100-P3 | |
| Կացիններ | 3+1 | |
| Օգտակար բեռ | 3 կգ | |
| Մանիպուլյատոր | Քաշը | 85 կգ |
| Տրամագիծը | 1100 մմ | |
| Կրկնելիություն | Դիրք | 0,05 մմ |
| Ռոտացիա | 0,05º | |
| Պտտման միջակայք | ±360° | |
| Առավելագույն արագություն | 540pp/min | |
| Իներցիայի թույլատրելի առավելագույն պահը | 31 × 10-4կգ .մ2 | |
| Ակտիվացված թեւի անկյունային տիրույթ | Վերև | 32,5º |
| Ներքև | 68,5º | |
| Էլեկտրամատակարարում | Եռաֆազ 380VAC -10%~+10%, 49~61HZ | |
| Էլեկտրաէներգիայի հզորություն | 10 ԿՎԱ | |
| Գնահատված հզորություն | 6,1 կՎտ | |
| Պահպանման ջերմաստիճանը | -10℃~70℃ | |
| Աշխատանքային միջավայր | -10℃~50℃,RH≤80% | |
| Պաշտպանություն | IP55/IP67 | |
Ապրանքի գծանկար
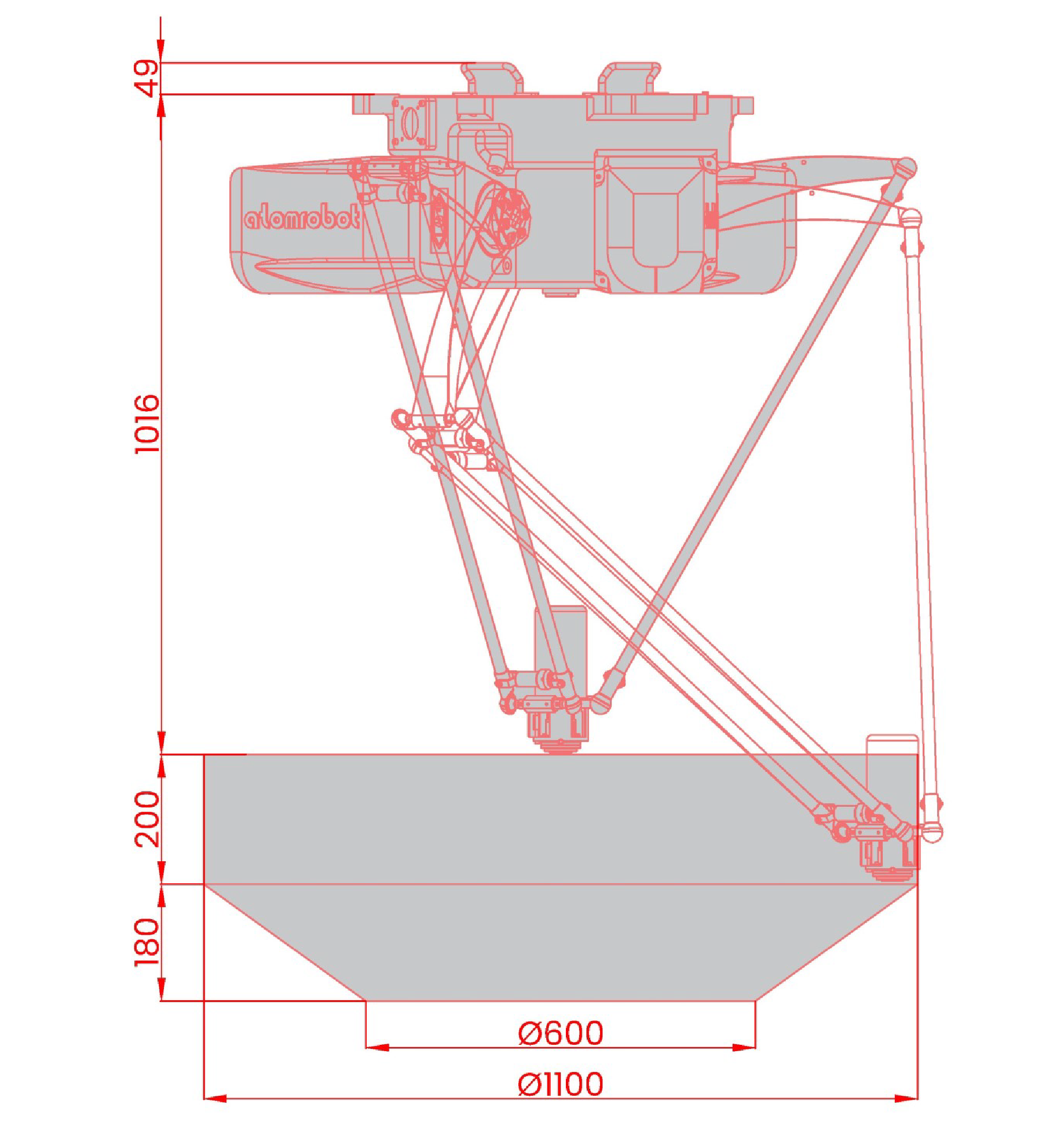
01. Չափերը և աշխատանքային միջակայքը (մմ)
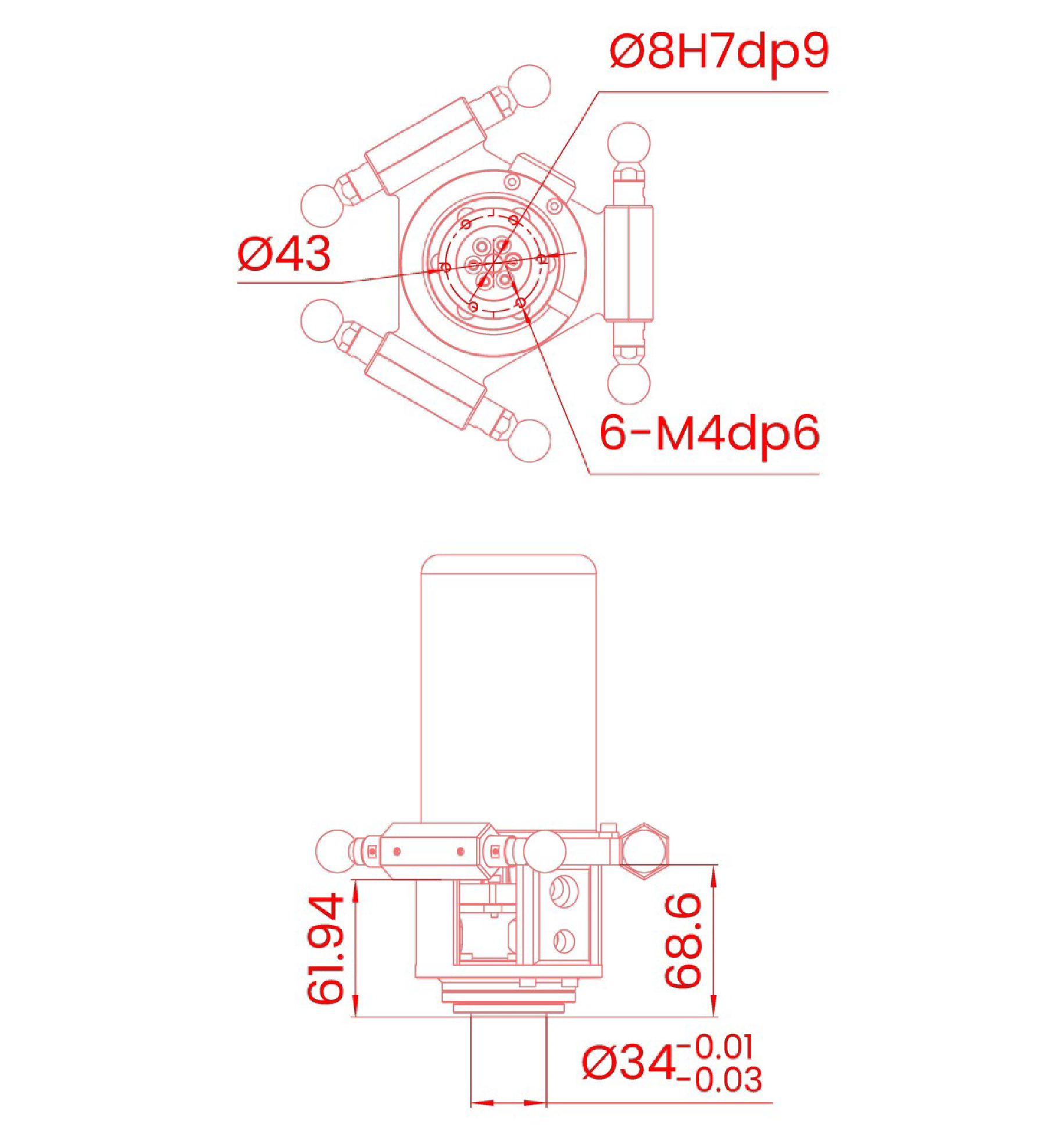
02. Կցաշուրթ (մմ)
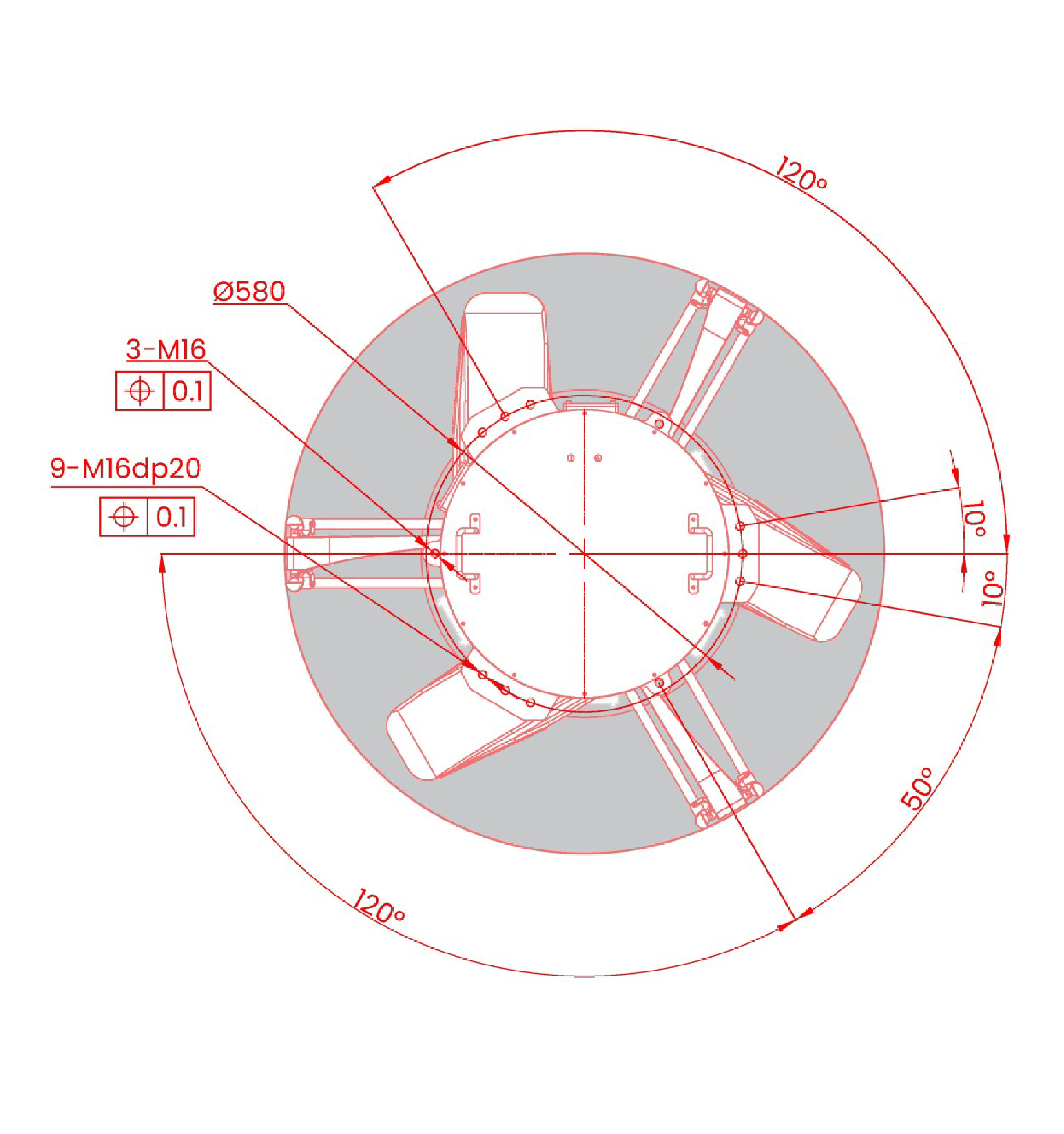
03. Հիմքի տեղադրում (մմ)
Գրեք ձեր հաղորդագրությունը այստեղ և ուղարկեք այն մեզ